موتور سه فاز القایی چیست؟ | راهنمای کامل ۰ تا ۱۰۰
9دقیقه
آنچه در این مقاله میخوانید [پنهانسازی]
تصور کنید برای یک لحظه تمام کارخانهها ساکت شوند. نوار نقالهها بایستند، پمپها از کار بیفتند و آسانسورها در میانه راه متوقف شوند. این سکوت کرکننده، دنیای بدون موتور سه فاز القایی است. این ماشینهای به ظاهر ساده، قهرمانان گمنامی هستند که چرخهای تمدن مدرن را بیوقفه به حرکت درمیآورند. اما این اسب کاری صنعت، این جعبه فلزی که با زمزمهای قدرتمند میچرخد، چگونه کار میکند؟
پاسخ در یک رقص نامرئی نهفته است. رقصی از جنس مغناطیس. الکتروموتورهای آسنکرون، بر خلاف بسیاری از موتورهای دیگر، هیچ اتصال فیزیکی یا جاروبکی برای انتقال نیرو به بخش چرخان خود ندارند. همه چیز از طریق القای الکترومغناطیسی رخ میدهد؛ یک جادوی مهندسی که نیکولا تسلا به جهان هدیه داد و سادگی آن، بزرگترین نقطه قوتش است. این مقاله، داستان همین سادگی پیچیده است.
این اسب کاری صنعت واقعاً چیست؟ فراتر از تعریف کتابی
اگر از یک مهندس برق بپرسید، احتمالاً تعریفی دقیق و فنی تحویلتان میدهد. اما من معتقدم روح یک ماشین را باید در مفهوم آن جستجو کرد. موتور القایی سه فاز را یک ترانسفورماتور در نظر بگیرید که سیمپیچ ثانویه آن آزاد است تا بچرخد. همین. تمام مفهوم در همین یک جمله خلاصه میشود.
بخش ثابت موتور (استاتور) مانند سیمپیچ اولیه ترانسفورماتور عمل میکند و بخش چرخان (روتور) مانند سیمپیچ ثانویه اتصال کوتاه شده. وقتی برق سه فاز به استاتور متصل میشود، یک پدیده شگفتانگیز رخ میدهد که سنگ بنای عملکرد این موتور است: میدان مغناطیسی دوار. این میدان، بدون هیچ حرکت مکانیکی در استاتور، در فضای داخلی آن با سرعتی ثابت شروع به چرخیدن میکند.
رقص نامرئی میدان مغناطیسی: جادوی عملکرد موتور القایی
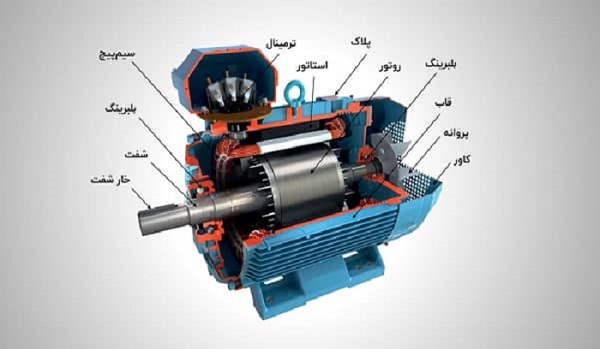
برای درک عمیقتر این فرآیند، باید دو بازیگر اصلی این صحنه را بشناسیم: استاتور و روتور. عملکرد هماهنگ این دو، گشتاور و چرخش را خلق میکند.
H3: استاتور (Stator): صحنه نمایش قدرت
استاتور بخش ثابت و بیرونی موتور است. این قسمت از یک هسته آهنی ورقهورقه (برای کاهش تلفات گردابی) و چندین دسته سیمپیچ مسی تشکیل شده است. برق سه فاز ورودی به این سیمپیچها اعمال میشود. این سه فاز با یکدیگر ۱۲۰ درجه اختلاف فاز الکتریکی دارند. وقتی این جریانهای متناوب در سیمپیچهایی که با ۱۲۰ درجه اختلاف مکانی قرار گرفتهاند جاری میشوند، میدانهای مغناطیسی تولید میکنند که برآیند آنها یک میدان مغناطیسی با اندازه ثابت است که با سرعتی مشخص در حال چرخش است. به این سرعت، سرعت سنکرون میگویند و مستقیماً به فرکانس برق و تعداد قطبهای موتور بستگی دارد.
فرمول سرعت سنکرون (NsN_s) این است:
Ns=120×fP N_s = \frac{120 \times f}{P}
که در آن:
- NsN_s سرعت سنکرون بر حسب دور بر دقیقه (RPM) است.
- ff فرکانس منبع تغذیه (در ایران ۵۰ هرتز) است.
- PP تعداد قطبهای موتور است (عددی زوج مانند ۲، ۴، ۶).
H3: روتور (Rotor): بازیگری که هرگز به مقصد نمیرسد
اینجا نقطه اوج داستان است. معروفترین نوع روتور، روتور قفس سنجابی (Squirrel Cage Rotor) نام دارد. چرا؟ چون ساختار آن شبیه قفس استوانهای است که برای حیوانات کوچک میسازند. این روتور از میلههای رسانای ضخیمی (معمولاً آلومینیوم یا مس) تشکیل شده که در دو انتها توسط حلقههایی به هم اتصال کوتاه شدهاند. هیچ سیمپیچ یا منبع تغذیه خارجی به آن متصل نیست.
حالا تصور کنید این قفس سنجابی درون میدان مغناطیسی دوار استاتور قرار گرفته است. میدان مغناطیسی در حال چرخش، میلههای رسانای روتور را قطع میکند. طبق قانون القای فارادی، این قطع شدن شار مغناطیسی، ولتاژ و در نتیجه جریانی عظیم را در میلههای روتور القا میکند. از طرفی، طبق قانون لنز، این جریان القایی خود میدانی مغناطیسی تولید میکند که با عامل بوجود آورندهاش (یعنی چرخش میدان استاتور) مخالفت میکند. این تقابل و کشمکش بین دو میدان مغناطیسی، نیرویی به روتور وارد کرده و آن را در جهت چرخش میدان استاتور به حرکت در میآورد.
نکته کلیدی اینجاست: روتور هرگز به سرعت سنکرون نمیرسد. اگر سرعت روتور با سرعت میدان مغناطیسی برابر شود، دیگر هیچ خطوط قوتی قطع نمیشود، جریانی القا نمیشود و گشتاوری وجود نخواهد داشت. این اختلاف سرعت جزئی بین میدان استاتور و روتور، لغزش (Slip) نام دارد و برای تولید گشتاور حیاتی است.
چرا موتورهای القایی سه فاز بر صنعت حکمرانی میکنند؟
محبوبیت افسانهای این موتورها تصادفی نیست. این یک انتخاب منطقی بر اساس مجموعهای از مزایای انکارناپذیر است که هر مدیر صنعتی یا مهندس طراحی را مجاب میکند.
- ساختار جانسخت و قابل اعتماد: نبود جاروبک، کلکتور و حلقههای لغزان (در مدل قفس سنجابی) به معنای قطعات متحرک کمتر و استهلاک بسیار پایین است. این موتورها برای کار در شرایط سخت و بیوقفه ساخته شدهاند.
- تعمیر و نگهداری حداقلی: عمده نگهداری این موتورها به بازرسی و گریسکاری دورهای بلبرینگها خلاصه میشود. این یعنی کاهش هزینههای عملیاتی و زمان از کار افتادگی (Downtime).
- هزینه اولیه پایین: به دلیل طراحی سادهتر، هزینه تولید و قیمت نهایی الکتروموتورهای آسنکرون نسبت به سایر موتورها با توان مشابه، به مراتب کمتر است.
- راهاندازی آسان: میتوان آنها را مستقیماً به شبکه برق سه فاز متصل کرد (اگرچه برای موتورهای بزرگ از روشهای راهاندازی نرمتر استفاده میشود).
- راندمان بالا: موتورهای القایی مدرن، به خصوص در ۷۵٪ تا ۱۰۰٪ بار نامی خود، راندمان بسیار خوبی دارند و انرژی کمی را تلف میکنند.
فراتر از روشن و خاموش: چگونه سرعت و گشتاور را کنترل کنیم؟
بزرگترین چالش موتور القایی، ذاتاً سرعت ثابت بودن آن است. سرعت این موتور به فرکانس برق و تعداد قطبها گره خورده است. اما بسیاری از کاربردهای صنعتی نیازمند سرعت متغیر هستند. اینجاست که فناوریهای کنترلی وارد میدان میشوند.
درایو فرکانس متغیر (VFD): رهبر ارکستر سرعت
بدون شک، انقلابیترین ابزار برای کنترل سرعت موتور القایی، درایو فرکانس متغیر (Variable Frequency Drive) یا همان اینورتر است. این دستگاه الکترونیک قدرت، بین منبع برق و موتور قرار میگیرد و یک کار هوشمندانه انجام میدهد: فرکانس و ولتاژ برق ورودی به موتور را تغییر میدهد.
همانطور که در فرمول سرعت سنکرون دیدیم، سرعت مستقیماً با فرکانس متناسب است. VFD با کاهش یا افزایش فرکانس، به راحتی سرعت موتور را از تقریباً صفر تا حتی بالاتر از سرعت نامی آن کنترل میکند. این کنترل دقیق نه تنها انعطافپذیری فوقالعادهای به فرآیندها میبخشد، بلکه با راهاندازی نرم و بهینهسازی مصرف انرژی، باعث صرفهجویی قابل توجهی در هزینههای برق نیز میشود.
روشهای سنتیتر: ستاره-مثلث و راهانداز نرم
قبل از فراگیر شدن VFDها، مهندسان از روشهای دیگری برای مدیریت جریان راهاندازی سرکش موتورهای بزرگ استفاده میکردند. راهاندازی ستاره-مثلث (Star-Delta) یکی از متداولترین روشهاست. در این تکنیک، موتور ابتدا با سربندی ستاره (که ولتاژ و جریان کمتری میکشد) شروع به کار میکند و پس از رسیدن به سرعتی مشخص، سربندی به حالت مثلث (حالت کار دائم) تغییر میکند. این کار، شوک اولیه روی شبکه برق و تجهیزات مکانیکی را کاهش میدهد. راهانداز نرم (Soft Starter) نیز یک وسیله الکترونیکی است که ولتاژ را به صورت پلهای افزایش میدهد تا موتور به نرمی به سرعت نامی خود برسد، اما برخلاف VFD، قابلیت کنترل سرعت در حین کار را ندارد.
رمزگشایی پلاک موتور: راهنمای عملی پلاکخوانی
پلاک فلزی روی بدنه موتور، شناسنامه آن است. درک اطلاعات این پلاک برای انتخاب، نصب و بهرهبرداری صحیح از موتور ضروری است. بیایید مهمترین پارامترهای آن را با هم مرور کنیم:
- V (Voltage): ولتاژ کاری موتور را نشان میدهد. معمولاً به صورت دو عددی (مثلاً 230/400V) نوشته میشود که به نوع اتصال (مثلث/ستاره) بستگی دارد.
- A (Current): جریان مصرفی موتور در حالت بار کامل را نشان میدهد.
- kW or HP: توان خروجی مکانیکی موتور بر حسب کیلووات یا اسب بخار است.
- RPM (Revolutions Per Minute): سرعت چرخش روتور در حالت بار کامل را نشان میدهد. این عدد همیشه کمی از سرعت سنکرون کمتر است.
- Hz (Hertz): فرکانس نامی برق ورودی (در ایران ۵۰ هرتز).
- IP (Ingress Protection): درجه حفاظت بدنه موتور در برابر نفوذ اجسام خارجی (مثل گرد و غبار) و آب را با دو عدد مشخص میکند. عدد اول مربوط به جامدات و عدد دوم مربوط به مایعات است (مثلاً IP55).
- Cos φ (Power Factor): ضریب توان موتور که نشاندهنده میزان بهینه بودن مصرف توان راکتیو است. هرچه این عدد به ۱ نزدیکتر باشد، بهتر است.
- Frame Size: ابعاد فیزیکی و استاندارد نصب موتور را مشخص میکند.
سوالات متداول (FAQ): پاسخ به کنجکاویهای شما
- تفاوت موتور القایی (آسنکرون) با موتور سنکرون چیست؟
تفاوت اصلی در سرعت روتور است. در موتور آسنکرون، روتور همیشه با سرعتی کمتر از میدان مغناطیسی (سرعت سنکرون) میچرخد (یعنی لغزش وجود دارد). اما در موتور سنکرون، روتور دقیقاً با همان سرعت میدان مغناطیسی میچرخد و هیچ لغزشی ندارد. موتورهای سنکرون در کاربردهایی که نیاز به سرعت کاملاً ثابت و دقیق دارند (مانند ساعتها یا ژنراتورها) استفاده میشوند.
- آیا میتوان یک موتور سه فاز را با برق تکفاز راهاندازی کرد؟
بله، این کار با استفاده از اینورترهای تکفاز به سه فاز یا با استفاده از خازنها (برای موتورهای کوچک) امکانپذیر است، اما معمولاً با کاهش توان خروجی موتور همراه خواهد بود. استفاده از VFD بهترین و ایمنترین راهکار برای این منظور است.
- مفهوم “لغزش” (Slip) در عمل به چه معناست؟
لغزش نشاندهنده میزان باری است که روی موتور قرار دارد. در حالت بیباری، لغزش بسیار کم و نزدیک به صفر است (سرعت روتور خیلی به سرعت سنکرون نزدیک است). با افزایش بار روی شفت موتور، روتور کمی کندتر میشود، لغزش افزایش مییابد، جریان القایی در روتور بیشتر شده و گشتاور لازم برای گرداندن بار تامین میشود. لغزش نامی یک موتور معمولاً بین ۲ تا ۵ درصد است.
- چرا ضریب توان (Cos φ) در پلاک موتور اهمیت دارد؟
ضریب توان پایین به این معناست که موتور علاوه بر توان اکتیو (که کار مفید انجام میدهد)، توان راکتیو زیادی از شبکه میکشد. این توان راکتیو، ظرفیت خطوط انتقال و ترانسفورماتورها را اشغال میکند و میتواند منجر به جریمه از سوی اداره برق شود. استفاده از بانکهای خازنی یا VFD های مدرن میتواند به اصلاح ضریب توان کمک کند.
نتیجهگیری: فراتر از یک ماشین، یک پارادایم مهندسی
موتور سه فاز القایی چیزی بیش از یک قطعه صنعتی است؛ این یک نماد از نبوغ مهندسی در سادگی است. ماشینی که با حداقل پیچیدگی، حداکثر کارایی و اطمینان را ارائه میدهد. این درس بزرگی است: گاهی اوقات بهترین راهحل، پیچیدهترین آن نیست. درک عمیق اصول بنیادی فیزیک، مانند القای الکترومغناطیسی، میتواند به خلق ابزارهایی منجر شود که یک قرن بعد همچنان ستون فقرات تمدن صنعتی باقی بمانند.
توصیه نهایی من به شما این است: دفعه بعد که یک الکتروموتور سه فاز را میبینید، فقط به عنوان یک جعبه فلزی به آن نگاه نکنید. به رقص نامرئی و قدرتمند میدانهای مغناطیسی در درون آن فکر کنید. به این واقعیت که این چرخش بیصدا، نتیجه مستقیم یکی از زیباترین اصول فیزیک است که توسط ذهن خلاق بشر مهار شده است. هنگام انتخاب یا عیبیابی، فراتر از توان نامی فکر کنید. به کلاس بهرهوری انرژی (IE)، درجه حفاظت (IP) و تناسب آن با بار مکانیکی خود توجه کنید. انتخاب هوشمندانه و نگهداری صحیح، تضمین میکند که این قلب تپنده، برای سالهای متمادی با قدرت و وفاداری برای شما کار کند.